四维图新用户大会:协同行业伙伴共同打造智驾数据闭环生态

10月10日,四维图新以“智进 新途”为主题的2023用户大会在上海召开。由中国地理信息产业协会指导,中国地理信息产业协会高精地图服务工作委员会与四维图新联合主办的“地图与数据闭环主题论坛”同期举办。地图与数据闭环主题论坛上来自行业协会、主机厂、地图企业、智驾企业等行业大咖分享了地图与数据应用在智能驾驶方向的创新观点及落地成果,站在行业的角度分享经验、贡献观点。
在汽车智能化加速发展的今天,汽车正朝着移动算力终端和存储终端的方向进化,车身搭载的传感器随时随地都将产生大量的数据。而地图作为“传感器”之一,同时又可作为各种数据的“载体”,具有信息量大、属性要素丰富、精度高、鲜度高、先验等特点,能够与车辆自身产生的数据相互作用,进而加快智驾相关应用落地。如何高效应用数据、打通不同数据间的链路最终实现数据间的正向循环,是现阶段高阶自动驾驶落地面临的重要课题之一。
四维图新地图中心总经理 李翔:

李翔带来了四维图新创新性轻量化高精度地图产品助力全场景NOP快速落地,同时也道出了汽车智能化发展过程中数据闭环的重要性。
HD Lite是四维图新面向极致性价比的全场景NOP地图解决方案,覆盖全国高速公路、城市快速路和城市铺装道路,通过众源视觉感知设备及云端数据融合更新成图,提供超视距车道级先验信息,可有效提升智驾整体方案的鲁棒性和稳定性,也降低了车端传感器和算力成本。HD Lite具备米级精度和NOP核心要素,实现了更高的更新鲜度和更广泛的数据覆盖,可满足绝大部分用户的需求,为NOP快速落地提供可靠的数据支撑。
李翔认为现实世界存在大量复杂场景,智驾需要各种场景case的收集来训练算法,而地图也需要持续提升鲜度,为智驾助力,所以数据闭环对行业的重要性毋庸置疑。李翔向行业发出诚邀,希望各方共同打造智驾数据闭环生态,为智能驾驶行业发展提供有力支撑。
华为云EI汽车领域总经理 吴小东:

华为云EI汽车领域总经理吴小东带来了《盘古大模型赋能自动驾驶,释放量产加速度》的主题演讲。吴小东指出影响高阶自动驾驶落地的关键因素,不再是解决常见的一般案例,而是让模型快速学习各类不常见、但不断出现的“长尾问题”。因此,如何提升数据处理效率,如何加速模型迭代,成为影响自动驾驶技术快速演进的关键。
大模型正在变革自动驾驶的研发模式,华为云从以下六个方面来加速量产车数据闭环:1、通过数据融合架构的升级,打破数据与AI资源的管理边界,使存储成本降低30%,创新效率提升2倍;2、ModelArts AI 开发生产线提供3大Turbo能力,加速模型训练,倍速提升模型训练效率;3、昇腾AI云服务可以为自动驾驶研发提供千卡训练、一个月不中断的澎湃算力,为行业客户提供更可靠的算力选择;4、通过盘古大模型的能力变革自动驾驶研发模式,场景生成大模型、场景理解大模型、预标注大模型、多模态检索大模型等,大幅提升了数据处理效率。5、盘古inside后的华为云八爪鱼自动驾驶工具链能力全面升级,助力自动驾驶全流程数据闭环,日行千万公里仿真里程;6、华为云汽车专区,通过“3分区”合规架构和7层防护的体系化安全建设,联合四维图新等业内优质伙伴打造全流程的合规解决方案上线汽车专区。
吴小东表示,今年6月工信部提出支持L3级及更高级别的自动驾驶功能商业化应用,下一步,我国新能源汽车产业发展重点工作将围绕支持关键技术攻关、完善网联基础设施,深化测试示范应用来开展,这一重要指示为自动驾驶技术发展与应用指明了方向,华为云和伙伴客户一起识别了自动驾驶存在十大挑战, 华为云愿做最坚实云底座,联合 产、学、研、用多方共同推动自动驾驶关键技术的攻坚,形成产业合力助力产业发展!
四维图新高级副总裁 蒋晟:

蒋晟带来了《面向汽车智能化,动态交通业务的思考与探索》主题分享并参与圆桌论坛对话环节。
蒋晟认为智能化时代对动态信息的需求在不断演变,地图的辅助,云的加持,让自动驾驶更可靠,云端数据对于自动驾驶是不可或缺的冗余数据。四维图新从云基础到数据工具链,到丰富的业务应用形态,全方位构建智能云生态,助力自动驾驶往更高效、更安全、更舒适的方向演进。
此外,在谈到地图和数据闭环如何助力智驾发展方面时,蒋晟提到我们不仅仅要单一的如地图数据闭环,还需要把汽车智能化作为一个整体系进行产品闭环。数据闭环作为底层能力的基础,需要有不断引入数据更新,尤其通过智能汽车量产,获得低成本高精度的数据,去补充日常数据缺失。这样能保证智驾算法服务能力的提升。
ICV自动驾驶地图基础平台产业联盟秘书长、国汽智图董事总经理 冯昶:

冯昶从整个行业角度出发,讲述 ICV自动驾驶地图基础平台产业联盟如何为数据闭环打造海量时空数据基座,以实现平台共建、资源共享,共赢未来。
冯昶介绍到:数据闭环可以支撑、优化、完善算法和软件以扩展更多场景,目前国内自动驾驶地图产业遇到的生产成本高、更新慢以及信息丰富的不足的问题也可以通过数据闭环的支持进行解决,但这需要海量的数据支撑,单靠一家企业,投入巨大,难以应对。
为此,今年7月,由中国汽车工程学会、中国测绘学会、国家智能网联汽车创新中心、中国地图出版社集团有限公司四家单位共同发起成立了「智能网联汽车自动驾驶地图基础平台产业联盟」,通过建设国家级、中立、权威的联盟平台,可以更好地推动国内在自动驾驶地图领域的跨域协同合作,在保障国家地理信息安全的前提下,解决行业面临的缺乏海里数据等关键、共性难题,使产业链降本增效、高质量发展。
禾多科技副总裁 戴震:

禾多科技副总裁戴震发表了《打通基于场景的数据闭环,推动自动驾驶算法持续迭代》主题演讲。他认为数据场景化是自动驾驶的必由之路。当下可驱动多样性的自动驾驶前装量产方案,到海量数据驱动全自动迭代升级,最终实现无人驾驶。
他介绍到禾多科技能通过创新技术自动挖掘难例场景,充分利用多信息融合的方式自动挖掘更多的难例场景。禾多自研车端场景识别和数据回传模块,高效获取真实交通环境下有价值和有挑战性的的场景,定义有效数据采集触发条件,条件满足时,系统自动提取各传感器数据,通过无线网络回传到云端,极大提高数据采集效率和自动化程度。可以实现8大类多达100余不同场景的识别与回传,可发现的问题占测试人工发现问题的80%以上。
四维图新欧洲总经理 Michael Schuerdt:

智能汽车产生的海量数据涉及地理信息安全、个人信息安全甚至国家安全,那么数据如何正确且合规的使用,仍然是行业内普遍关心的话题。随着中国汽车出海步伐加速,中国汽车面临着更多海外数据合规的要求。四维图新旗下子公司四维欧洲总经理Michael Schuerdt介绍了四维图新数据合规全球化解决方案。
四维图新汽车数据合规全球化解决方案,包含从数据收集到匿名化处理,从数据标记到数据回传,全流程基于对当地隐私法律合规要求设计和实施,为中国汽车出海保驾护航。
普强信息联合创始人、CTO 李全忠:

在主题论坛中,四维图新生态企业普强信息联合创始人、CTO李全忠分享普强深思大模型的最新技术架构、能力成果和特点,并正式发布普强深思智舱大模型。基于普强信息先进的人工智能和深度学习算法,深思大模型专注智能座舱应用,拥有更强大的对话理解能力,全面支持多音区、多语种、多模态、多轮交互、多意图理解等,准确预测用户的需求,通过多模态交互方式,让用户更加轻松畅享各种应用功能,包括娱乐和导航等体验。
深思大模型基于混合技术架构,将用户的座舱打造成一个智能的生态系统,快速与现有座舱智能交互系统有机融合,同时提供开放的接口功能,与手机、家居设备等生态实现无缝连接,达到全方位信息共享和控制。协助用户轻松管理行程、获取实时路况、控制家中设备,让驾驶体验更加便捷高效。
"深思"大模型不仅是一款产品,更是私人汽车专家。通过深入学习用户的偏好和驾驶习惯,智能决策,拟人情感,为用户主动推送定制化的建议和推荐。无论是路线选择、车辆维护还是娱乐选择,"深思"都能给予用户最专业的指导和建议。
ICV自动驾驶地图基础平台产业联盟副秘书长、国汽智图副总经理 张欣:

ICV自动驾驶地图基础平台产业联盟副秘书长、国汽智图副总经理张欣参与了圆桌对话环节。
在谈到未来地图及数据闭环形态时,张欣认为应该通过产业生态开放合作,实现近距离、短链条、供需敏捷迭代的"产销闭环"的地图服务产品,形成从数据到模型的数据闭环和从数据到地图的"图数据闭环"的双环驱动,为各级别智能驾驶量产落地提供低成本、高鲜度、高可靠的地图服务支撑和模型支撑。
标签:
- 四维图新用户大会:协同行业伙伴共同打造智驾数据闭环生态 10月10日,四维图新以“智进 新途”为主题的2023用户大会在上海召
-
 华彩三农应邀参加2023中国商界领袖年会 2023年9月,华彩三农总经理余锦辉应邀参加“2023中国商界领袖年会、
华彩三农应邀参加2023中国商界领袖年会 2023年9月,华彩三农总经理余锦辉应邀参加“2023中国商界领袖年会、 -
 聚焦茶文化、茶生活、茶消费!2023成都茶博会10月19日-22日举办 为全面贯彻党的二十大精神,深入落实国家“消费提振年”恢复和扩大
聚焦茶文化、茶生活、茶消费!2023成都茶博会10月19日-22日举办 为全面贯彻党的二十大精神,深入落实国家“消费提振年”恢复和扩大 -
 对话在明律所:全国化、高质量服务,为当事人持续创造价值 在行政法服务领域,北京在明律师事务所(以下简称“在明律所”)是
对话在明律所:全国化、高质量服务,为当事人持续创造价值 在行政法服务领域,北京在明律师事务所(以下简称“在明律所”)是 -
 当远铁路跨焦柳线特大桥成功转体 10月11日凌晨,湖北铁路集团当远铁路跨焦柳线特大桥转体成功,为当
当远铁路跨焦柳线特大桥成功转体 10月11日凌晨,湖北铁路集团当远铁路跨焦柳线特大桥转体成功,为当 -
 “买10万的车叫什么叫”?丰田涉事4S店道歉 环球即时看 中新网10月11日电 10日,丰田经销商吼客户买十万的车叫什么叫话题
“买10万的车叫什么叫”?丰田涉事4S店道歉 环球即时看 中新网10月11日电 10日,丰田经销商吼客户买十万的车叫什么叫话题
- 四维图新用户大会:协同行业伙伴共同打造智驾数据闭环生态 10月10日,四维图新以“智进 新途”为主题的2023用户大会在上海召
-
 今日热闻!消费数据产权保护不容小觑 中秋国庆假期,消费迎来热潮。人们在不同消费场景体验中发现,部分
今日热闻!消费数据产权保护不容小觑 中秋国庆假期,消费迎来热潮。人们在不同消费场景体验中发现,部分 -
 全国秋粮收获进行时:农户抢收忙 “丰”景美如画-速递 农业农村部最新农情调度显示,目前全国秋粮收获近六成。眼下,全国
全国秋粮收获进行时:农户抢收忙 “丰”景美如画-速递 农业农村部最新农情调度显示,目前全国秋粮收获近六成。眼下,全国 - 华彩三农应邀参加2023中国商界领袖年会 2023年9月,华彩三农总经理余锦辉应邀参加“2023中国商界领袖年会、
- 对话在明律所:全国化、高质量服务,为当事人持续创造价值 在行政法服务领域,北京在明律师事务所(以下简称“在明律所”)是
- 聚焦茶文化、茶生活、茶消费!2023成都茶博会10月19日-22日举办 为全面贯彻党的二十大精神,深入落实国家“消费提振年”恢复和扩大
-
 南召法院开展集中执行活动-全球即时看 为进一步巩固执行成果,全力冲刺法院四季度执行质效,保障人民群众合法
南召法院开展集中执行活动-全球即时看 为进一步巩固执行成果,全力冲刺法院四季度执行质效,保障人民群众合法 -
 南阳市中级人民法院到南召法院调研指导网络安全和司法技术等工作 10月10日下午,南阳市中级人民法院司法技术鉴定处处长吴峰等一行5人,
南阳市中级人民法院到南召法院调研指导网络安全和司法技术等工作 10月10日下午,南阳市中级人民法院司法技术鉴定处处长吴峰等一行5人, -
 罗山庙仙派出所:当好“安全卫士”守护一方平安 白天,警察走村入户,宣传安全知识,摸排化解安全风险,夜晚,学生下自
罗山庙仙派出所:当好“安全卫士”守护一方平安 白天,警察走村入户,宣传安全知识,摸排化解安全风险,夜晚,学生下自 -
 河南邓州法院:“豫剑执行”不停歇 持之以恒护权益_全球今热点 为切实维护司法权威,保护当事人合法权益,10月11日凌晨,河南省邓州市
河南邓州法院:“豫剑执行”不停歇 持之以恒护权益_全球今热点 为切实维护司法权威,保护当事人合法权益,10月11日凌晨,河南省邓州市 -
 图说息县:广角镜头下的城乡之美-当前热议 豫风激荡,息韵悠扬,千年古息日新月异。淮水奔涌,濮山叠翠,息州儿女
图说息县:广角镜头下的城乡之美-当前热议 豫风激荡,息韵悠扬,千年古息日新月异。淮水奔涌,濮山叠翠,息州儿女 - 当远铁路跨焦柳线特大桥成功转体 10月11日凌晨,湖北铁路集团当远铁路跨焦柳线特大桥转体成功,为当
-
 每日快讯!固始公安:高效调解暖人心 群众送锦旗致谢 “感谢民警的帮助,在我们束手无策之际伸出援助之手,调处两家的矛盾纠
每日快讯!固始公安:高效调解暖人心 群众送锦旗致谢 “感谢民警的帮助,在我们束手无策之际伸出援助之手,调处两家的矛盾纠 -
 全球热门:筑梦青春 强国有我——西平县杨庄高中举行迎国庆演讲比赛决赛 10月10日下午,在校团委精心组织下,杨庄高中筑梦青春强国有我迎国庆演
全球热门:筑梦青春 强国有我——西平县杨庄高中举行迎国庆演讲比赛决赛 10月10日下午,在校团委精心组织下,杨庄高中筑梦青春强国有我迎国庆演 -
 信阳市羊山新区城管局多措并举推动垃圾分类成为低碳生活新时尚 为进一步提升辖区生活垃圾分类精细化管理水平,倡导垃圾分类理念,营造
信阳市羊山新区城管局多措并举推动垃圾分类成为低碳生活新时尚 为进一步提升辖区生活垃圾分类精细化管理水平,倡导垃圾分类理念,营造 -
 驻马店市驿城区南海街道练江社区:多举措化解群众矛盾纠纷 点亮社区“平安法治星... 在社会生活中,人与人之间难免会产生矛盾和纠纷。这些矛盾和纠纷如果不
驻马店市驿城区南海街道练江社区:多举措化解群众矛盾纠纷 点亮社区“平安法治星... 在社会生活中,人与人之间难免会产生矛盾和纠纷。这些矛盾和纠纷如果不 -
 快资讯:喜迎建队日 争做好队员——驻马店市第九小学举行2023年少先队建队日入队... 星星火炬,代代相传。为庆祝中国少年先锋队建队74周年,教育学生继承和
快资讯:喜迎建队日 争做好队员——驻马店市第九小学举行2023年少先队建队日入队... 星星火炬,代代相传。为庆祝中国少年先锋队建队74周年,教育学生继承和 -
 西平县重渠武海小学开展“听评课”活动|环球最资讯 为了提高全校教师的专业水平,2023年10月9日——12日,西平县重渠武海
西平县重渠武海小学开展“听评课”活动|环球最资讯 为了提高全校教师的专业水平,2023年10月9日——12日,西平县重渠武海 -
 全球热消息:西平县应急管理局召开未成年人安全保护工作安排部署会 为切实做好当前未成年人安全保护有关工作,做好校园安全暨未成年人保护
全球热消息:西平县应急管理局召开未成年人安全保护工作安排部署会 为切实做好当前未成年人安全保护有关工作,做好校园安全暨未成年人保护 -
 三季度ETF发行加速 新发规模创年内新高 新视野 来源:每日商报 作者:苗露在市场整体震荡调整、行业主题持续轮动
三季度ETF发行加速 新发规模创年内新高 新视野 来源:每日商报 作者:苗露在市场整体震荡调整、行业主题持续轮动 -
 股票私募积极布局 平均仓位升至80%-当前视讯 来源:证券时报受多重因素影响,股票市场持续震荡表现,创业板指数
股票私募积极布局 平均仓位升至80%-当前视讯 来源:证券时报受多重因素影响,股票市场持续震荡表现,创业板指数 -
 全球看热讯:全国打传规直普法大讲堂江西行活动举办 中国网财经10月11日讯(记者 段思琦)10月10日,全国打击传销规范直
全球看热讯:全国打传规直普法大讲堂江西行活动举办 中国网财经10月11日讯(记者 段思琦)10月10日,全国打击传销规范直 -
 萨摩耶云科技集团:深圳“20条”提振金融科技创新信心与能力|每日头条 无科技不金融,深圳推出的20条硬举措按下了金融支持科技创新升级键
萨摩耶云科技集团:深圳“20条”提振金融科技创新信心与能力|每日头条 无科技不金融,深圳推出的20条硬举措按下了金融支持科技创新升级键 -
 中国人民银行北京市分行《金融服务北京实体经济发展专栏》第25期 专栏介绍:为进一步提升北京地区金融、产业等相关政策的惠及面与协
中国人民银行北京市分行《金融服务北京实体经济发展专栏》第25期 专栏介绍:为进一步提升北京地区金融、产业等相关政策的惠及面与协 -
 降低民企融资成本 加强合法权益保护 最高人民法院出台指导意见促进民营经济发展壮大降低民企融资成本
降低民企融资成本 加强合法权益保护 最高人民法院出台指导意见促进民营经济发展壮大降低民企融资成本 -
 焦点信息:油价迎下半年首次回落 地缘政治冲突成短期主要影响因素 中国网财经10月11日讯(记者 畅帅帅)国内油价迎下半年以来首次下调
焦点信息:油价迎下半年首次回落 地缘政治冲突成短期主要影响因素 中国网财经10月11日讯(记者 畅帅帅)国内油价迎下半年以来首次下调 -
 “十四五”以来新发现157处大中型矿产地|天天视点 记者近日从自然资源部获悉:新一轮找矿突破战略行动取得阶段性成果
“十四五”以来新发现157处大中型矿产地|天天视点 记者近日从自然资源部获悉:新一轮找矿突破战略行动取得阶段性成果 - 环球焦点!境内ETF总规模逾2万亿元 外资机构配置热情高涨 今年以来,境内ETF规模和数量屡创新高。最新数据显示,截至目前,ET
-
 *ST天山拟易主中电农创 “摘星脱帽”是股份能否完成转让关键因素 焦点关注 10月9日晚间,*ST天山发布公告称,公司控股股东湖州皓辉企业管理咨
*ST天山拟易主中电农创 “摘星脱帽”是股份能否完成转让关键因素 焦点关注 10月9日晚间,*ST天山发布公告称,公司控股股东湖州皓辉企业管理咨 -
 每日头条!A股首批三季报发布 柏楚电子、平煤股份“拔头筹” 10月10日晚间,柏楚电子和平煤股份发布了今年第三季度报告,这也是A
每日头条!A股首批三季报发布 柏楚电子、平煤股份“拔头筹” 10月10日晚间,柏楚电子和平煤股份发布了今年第三季度报告,这也是A -
 IPO披露10天前刚收到警示函 永创医药“带病闯关”北交所 10月9日,江苏永创医药科技股份有限公司(以下简称永创医药)发布公告
IPO披露10天前刚收到警示函 永创医药“带病闯关”北交所 10月9日,江苏永创医药科技股份有限公司(以下简称永创医药)发布公告 -
 天天看热讯:农村中小银行助力乡村振兴 多措并举解决农村金融难题 10月9日,国家金融监督管理总局网站发布消息,将引领农村中小银行深
天天看热讯:农村中小银行助力乡村振兴 多措并举解决农村金融难题 10月9日,国家金融监督管理总局网站发布消息,将引领农村中小银行深 - 立足三大创新,平安社区网格模式助力破解存续客户经营难题 播报 10月11日,中国平安人寿保险股份有限公司(以下简称平安人寿或公司)
-
 国家金融监督管理总局等三部门 发布金融消费者权益保护典型案例 10月10日,国家金融监督管理总局网站发布消息,为提升金融消费者教
国家金融监督管理总局等三部门 发布金融消费者权益保护典型案例 10月10日,国家金融监督管理总局网站发布消息,为提升金融消费者教 -
 今年前8个月我国服务进出口总额同比增长8%|快报 10月10日,商务部发布数据显示,今年前8个月,我国服务贸易继续保持
今年前8个月我国服务进出口总额同比增长8%|快报 10月10日,商务部发布数据显示,今年前8个月,我国服务贸易继续保持 -
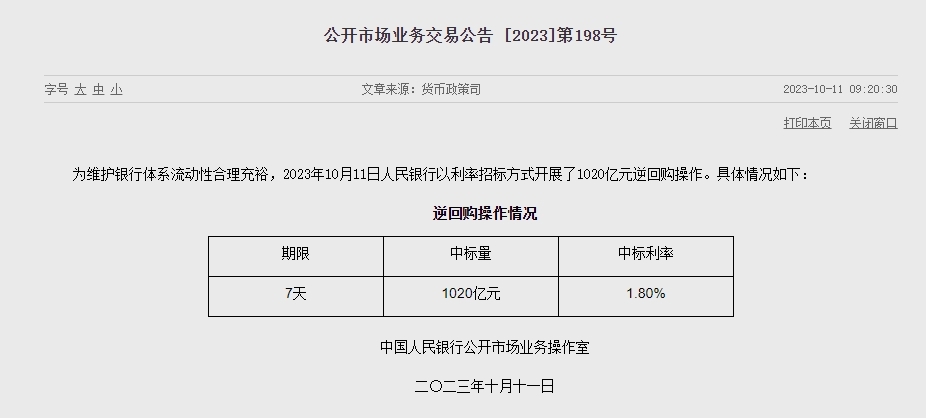 央行10月11日开展1020亿元逆回购操作 中标利率1.80% 据央行网站消息,为维护银行体系流动性合理充裕,2023年10月11日人
央行10月11日开展1020亿元逆回购操作 中标利率1.80% 据央行网站消息,为维护银行体系流动性合理充裕,2023年10月11日人 -
 是它还是它!AI带着3%的涨幅又回来了! 10月11日,人工智能板块大涨,截止上午10:40,中证人工智能指数(930
是它还是它!AI带着3%的涨幅又回来了! 10月11日,人工智能板块大涨,截止上午10:40,中证人工智能指数(930 -
 九部门印发意见推进城市公交发展:落实运营补贴 动态调整价格 交通运输部等9部门近日联合印发《关于推进城市公共交通健康可持续发
九部门印发意见推进城市公交发展:落实运营补贴 动态调整价格 交通运输部等9部门近日联合印发《关于推进城市公共交通健康可持续发 -
 成品油价下半年首次下调_今日关注 国家发改委通知,根据近期国际市场油价变化情况,按照现行成品油价
成品油价下半年首次下调_今日关注 国家发改委通知,根据近期国际市场油价变化情况,按照现行成品油价 -
 国银金租选举马红为董事长、靳涛为副董事长_当前热点 中国网财经10月11日讯(记者 魏国旭)国银金租昨日披露管理层变动,
国银金租选举马红为董事长、靳涛为副董事长_当前热点 中国网财经10月11日讯(记者 魏国旭)国银金租昨日披露管理层变动, -
 美联储放出鸽派信号,美股实现三连涨! 当地时间10月10日,美股连续第三日收涨,标普500指数上涨0 52%,道
美联储放出鸽派信号,美股实现三连涨! 当地时间10月10日,美股连续第三日收涨,标普500指数上涨0 52%,道 -
 看好四季度!多家外资机构上调中国经济预测,建议增配中国股票 多家外资机构发表对中国资产的乐观看法。近日,高盛、摩根大通、富
看好四季度!多家外资机构上调中国经济预测,建议增配中国股票 多家外资机构发表对中国资产的乐观看法。近日,高盛、摩根大通、富 - 中邮人寿斥资42.56亿元接盘大悦城控股子公司北京昆庭资管公司 中国网财经10月11日讯 昨日,深圳证券交易所官网信息披露显示,大
-
 自带社区食堂、健身房 上海又有4455套保租房源入市 上海又有4455套保障性租赁住房入市。10月11日,城投宽庭张江社区举
自带社区食堂、健身房 上海又有4455套保租房源入市 上海又有4455套保障性租赁住房入市。10月11日,城投宽庭张江社区举 -
 徐州复兴眼科医院王海菊:把病人当“亲人”的光明卫士|全球速读 从事眼科工作很辛苦,但当纱布揭开,看到患者的眼睛重获光明时,我
徐州复兴眼科医院王海菊:把病人当“亲人”的光明卫士|全球速读 从事眼科工作很辛苦,但当纱布揭开,看到患者的眼睛重获光明时,我 -
 今日快看!传统法律文化资源助力法治现代化建设 法治现代化是中国式现代化在法治领域中的具体体现,是中国法治建设
今日快看!传统法律文化资源助力法治现代化建设 法治现代化是中国式现代化在法治领域中的具体体现,是中国法治建设 -
 朱松出任华林证券首席执行官兼执委会主任委员 10月11日,华林证券召开第三届董事会第十一次会议,董事会决定聘任
朱松出任华林证券首席执行官兼执委会主任委员 10月11日,华林证券召开第三届董事会第十一次会议,董事会决定聘任 -
 世界滚动:外媒称印度拘捕四名行业高管 其中一人为vivo员工 vivo回应 据路透社等多家外媒报道,印度打击金融犯罪机构当地时间周二(10日)
世界滚动:外媒称印度拘捕四名行业高管 其中一人为vivo员工 vivo回应 据路透社等多家外媒报道,印度打击金融犯罪机构当地时间周二(10日) -
 9月大商所处理异常交易行为46起 中国网财经10月11日讯 为切实履行市场一线监管职责,规范期货交易
9月大商所处理异常交易行为46起 中国网财经10月11日讯 为切实履行市场一线监管职责,规范期货交易 -
 天天亮点!江西推动实施竹产业“千亿工程” 现有竹林面积1765万亩 中新网南昌10月11日电 (记者 李韵涵)11日,第十二届中国竹文化节
天天亮点!江西推动实施竹产业“千亿工程” 现有竹林面积1765万亩 中新网南昌10月11日电 (记者 李韵涵)11日,第十二届中国竹文化节
热门资讯
- 四维图新用户大会:协同行业伙伴共同打造智驾数据闭环生态 10月10日,四维图新以“智进 新途...
- 华彩三农应邀参加2023中国商界领袖年会 2023年9月,华彩三农总经理余锦辉应...
- 聚焦茶文化、茶生活、茶消费!2023成都茶博会10月19日-22日举办 为全面贯彻党的二十大精神,深入落...
- 对话在明律所:全国化、高质量服务,为当事人持续创造价值 在行政法服务领域,北京在明律师事...
观察
图片新闻
-
 环境友好、尊重劳动、品质优良、全程可溯,120万亩新疆棉田生产可持续棉花17万吨 央视网消息:10月10日,中国棉...
环境友好、尊重劳动、品质优良、全程可溯,120万亩新疆棉田生产可持续棉花17万吨 央视网消息:10月10日,中国棉... -
 国际三巨头降价、GLP-1降糖药强势,国产胰岛素能顺利出海吗 国产药出海的大趋势下,国产胰岛素...
国际三巨头降价、GLP-1降糖药强势,国产胰岛素能顺利出海吗 国产药出海的大趋势下,国产胰岛素... -
 园区合作,助力埃及工业现代化-快资讯 在红海之滨、苏伊士运河之南,刚迎...
园区合作,助力埃及工业现代化-快资讯 在红海之滨、苏伊士运河之南,刚迎... -
 第六届中国.河南招才引智2023年高层次专家服务基层示范团(淮滨行)活动成功举办 独家 为积极推进高层次人才、科研技术成...
第六届中国.河南招才引智2023年高层次专家服务基层示范团(淮滨行)活动成功举办 独家 为积极推进高层次人才、科研技术成...

精彩新闻
-
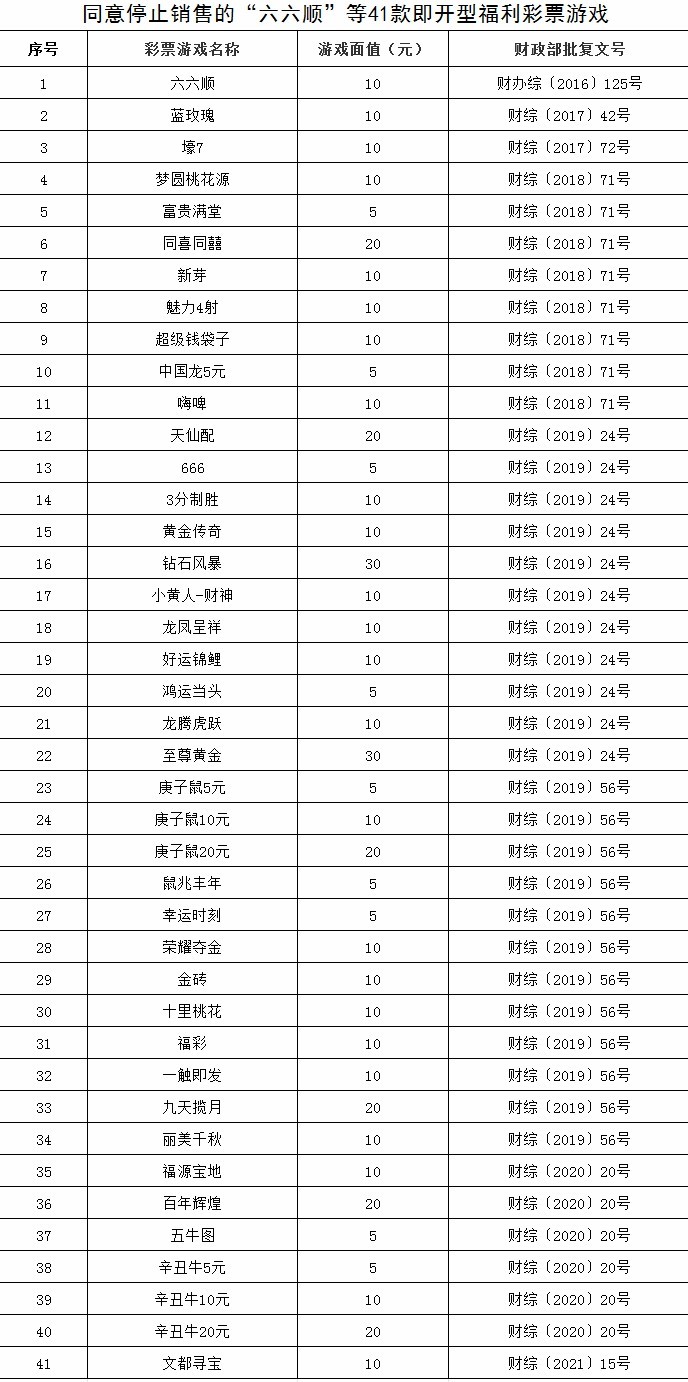 财政部:停止销售41款即开型福利彩票 据财政部网站消息,11日财政部发布...
财政部:停止销售41款即开型福利彩票 据财政部网站消息,11日财政部发布... -
 【新要闻】马来西亚超百人经贸代表团将参加第十三届马中企业家大会 【东盟专线】马来西亚超百人经贸代...
【新要闻】马来西亚超百人经贸代表团将参加第十三届马中企业家大会 【东盟专线】马来西亚超百人经贸代... -
 中信银行合肥分行积极开展适老化支付服务“百日行动” 为进一步深化安徽省适老化支付服务...
中信银行合肥分行积极开展适老化支付服务“百日行动” 为进一步深化安徽省适老化支付服务... -
 国华人寿社区公益课堂走进上海甘泉社区 聚焦社区助老金融服务事业 动态 为贯彻落实2023年金融消费者权益保...
国华人寿社区公益课堂走进上海甘泉社区 聚焦社区助老金融服务事业 动态 为贯彻落实2023年金融消费者权益保... -
 聚焦存续客户服务体验,平安人寿探索社区网格化模式_焦点热门 10月11日,中国平安人寿保险股份有...
聚焦存续客户服务体验,平安人寿探索社区网格化模式_焦点热门 10月11日,中国平安人寿保险股份有... -
 杂交水稻累计推广应用70多个国家 增产粮食近10000亿斤 世界聚焦 中新网长沙10月11日电 (唐小晴 ...
杂交水稻累计推广应用70多个国家 增产粮食近10000亿斤 世界聚焦 中新网长沙10月11日电 (唐小晴 ... -
 2023中国机器人大赛将亮相福建晋江 参赛人数创新高 中新网福建晋江10月11日电 (吴冠...
2023中国机器人大赛将亮相福建晋江 参赛人数创新高 中新网福建晋江10月11日电 (吴冠... -
 徐工成套应急救援装备亮相2023中国国际消防展 10月10日,以助力产业发展,服务消...
徐工成套应急救援装备亮相2023中国国际消防展 10月10日,以助力产业发展,服务消... -
 每日热门:国内首艘氢燃料电池动力船“三峡氢舟1”号首航 中新网宜昌10月11日电 (记者 董...
每日热门:国内首艘氢燃料电池动力船“三峡氢舟1”号首航 中新网宜昌10月11日电 (记者 董... -
 天天新动态:武汉二厂汽水又推易拉罐新品 每罐只卖1.99元 10月10日,兰世立对外宣布,武汉二...
天天新动态:武汉二厂汽水又推易拉罐新品 每罐只卖1.99元 10月10日,兰世立对外宣布,武汉二... -
 政策红包如雨下 城市公交运营难题怎么破 观焦点 近年来,公交运营难题屡现,不少公...
政策红包如雨下 城市公交运营难题怎么破 观焦点 近年来,公交运营难题屡现,不少公... -
 每日信息:“粤港澳大湾区至京津冀地区”集装箱快速班列再度启动 中新网广州10月11日电 (郭军 刘...
每日信息:“粤港澳大湾区至京津冀地区”集装箱快速班列再度启动 中新网广州10月11日电 (郭军 刘... - “买10万的车叫什么叫”?丰田涉事4S店道歉 环球即时看 中新网10月11日电 10日,丰田经销...
-
 (乡村行·看振兴)“中国油茶之乡”福建尤溪端稳“金油瓶” 中新网三明10月11日电 (雷朝良 ...
(乡村行·看振兴)“中国油茶之乡”福建尤溪端稳“金油瓶” 中新网三明10月11日电 (雷朝良 ... -
 世界热资讯!(高质量发展调研行)黄精产品远销多国 重庆“小众”产业“壮大”... 中新网重庆10月11日电 题:黄精产...
世界热资讯!(高质量发展调研行)黄精产品远销多国 重庆“小众”产业“壮大”... 中新网重庆10月11日电 题:黄精产... -
 深圳什么医院治疗癫痫好?广州协同医院正规靠谱效果理想 癫痫病在我们日常中已经变得非常常...
深圳什么医院治疗癫痫好?广州协同医院正规靠谱效果理想 癫痫病在我们日常中已经变得非常常... -
 西平县人大到专探乡产业园调研指导工作 世界通讯 10月11日上午,西平县人大常委会副...
西平县人大到专探乡产业园调研指导工作 世界通讯 10月11日上午,西平县人大常委会副... -
 环球新资讯:驻马店市第四小学开展2023年“缅怀先烈志 共铸中华魂”——“9.30... 为进一步推进爱国主义教育,缅怀革...
环球新资讯:驻马店市第四小学开展2023年“缅怀先烈志 共铸中华魂”——“9.30... 为进一步推进爱国主义教育,缅怀革... -
 驻马店市侨联到西平县师灵镇开展“驻马店浙江商会侨联敬老助老”走访慰问活动-世... 为弘扬中华民族尊老敬老的传统美德...
驻马店市侨联到西平县师灵镇开展“驻马店浙江商会侨联敬老助老”走访慰问活动-世... 为弘扬中华民族尊老敬老的传统美德... -
 共创文明城 同做文明人——西平县柏城邵庄小学创文志愿服务大行动-全球独家 为推动创文纵深拓展,以干净整洁、...
共创文明城 同做文明人——西平县柏城邵庄小学创文志愿服务大行动-全球独家 为推动创文纵深拓展,以干净整洁、... -
 天天热议:信阳市浉河区谭家河:多措并举提“两率” 助平安 为充分发挥信阳市浉河区谭家河乡人...
天天热议:信阳市浉河区谭家河:多措并举提“两率” 助平安 为充分发挥信阳市浉河区谭家河乡人... -
 每日讯息!息县:扮好“三员”角色 助力企业发展 息县项店镇牢固树立“项目为王”的...
每日讯息!息县:扮好“三员”角色 助力企业发展 息县项店镇牢固树立“项目为王”的... -
 今日报丨被网暴了应该怎么维权 习文谩骂、攻击,甚至人肉搜索曝光...
今日报丨被网暴了应该怎么维权 习文谩骂、攻击,甚至人肉搜索曝光... -
 北京推行施工图审查等多项改革 优化工程建设领域营商环境|全球速读 中新网北京10月11日电 (记者 陈...
北京推行施工图审查等多项改革 优化工程建设领域营商环境|全球速读 中新网北京10月11日电 (记者 陈... -
 淮滨县法院:开展安检技能培训 筑牢法院安全防线-全球快讯 为增强安保人员责任意识,进一步提...
淮滨县法院:开展安检技能培训 筑牢法院安全防线-全球快讯 为增强安保人员责任意识,进一步提... - 焦点精选!对任性游客,要用好“终身禁入”这张红牌 ■ 视点无视景区相关规定,游客被...
-
 天天热消息:报告:中国为跨国公司注入投资增长动能 《跨国公司在中国:全球跨国投资不...
天天热消息:报告:中国为跨国公司注入投资增长动能 《跨国公司在中国:全球跨国投资不... -
 江苏出台意见推进本科高校新文科建设 中新网南京10月11日电 (徐珊珊)11...
江苏出台意见推进本科高校新文科建设 中新网南京10月11日电 (徐珊珊)11... -
 北京持续推进高水平开放 “两区”建设三年落地近50项全国突破性政策 中新网北京10月11日电 (记者 吕...
北京持续推进高水平开放 “两区”建设三年落地近50项全国突破性政策 中新网北京10月11日电 (记者 吕... -
 焦点消息!中企中油工程子公司中标阿联酋相关油田项目 涉及合同额近3亿美元 中新社北京10月11日电 (记者 陈...
焦点消息!中企中油工程子公司中标阿联酋相关油田项目 涉及合同额近3亿美元 中新社北京10月11日电 (记者 陈... - 环境友好、尊重劳动、品质优良、全程可溯,120万亩新疆棉田生产可持续棉花17万吨 央视网消息:10月10日,中国棉...
-
 当前通讯!广州国际汽车零部件及售后市场展开幕 商家挖掘汽车后市场蓝海 中新网广州10月11日电 (记者 方...
当前通讯!广州国际汽车零部件及售后市场展开幕 商家挖掘汽车后市场蓝海 中新网广州10月11日电 (记者 方... -
 全球聚焦:上海4455套保租房源入市 为人才托起“安居梦” 中新网上海10月11日电 (记者 陈...
全球聚焦:上海4455套保租房源入市 为人才托起“安居梦” 中新网上海10月11日电 (记者 陈... -
 好消息!中东部大部将迎秋高气爽好天气 好消息!这几天的雨啊雪啊台风啊什...
好消息!中东部大部将迎秋高气爽好天气 好消息!这几天的雨啊雪啊台风啊什... -
 达成采购意向金额超9亿元 京蒙农畜产品流通合作推介会举行 中新网北京10月11日电 由内蒙古自...
达成采购意向金额超9亿元 京蒙农畜产品流通合作推介会举行 中新网北京10月11日电 由内蒙古自... -
 台湾花莲县发生5.4级地震 震源深度14千米|每日快讯 中新网10月11日电 据国家地震台网...
台湾花莲县发生5.4级地震 震源深度14千米|每日快讯 中新网10月11日电 据国家地震台网... -
 广东建设绿美保护地 勾勒人与自然和谐共生图景 中新网广州10月11日电 题:广东建...
广东建设绿美保护地 勾勒人与自然和谐共生图景 中新网广州10月11日电 题:广东建... -
 真诚赢得善意,“一元午餐”饭钱意外多出1012元-当前速讯 河南老君山景区无人值守的一元午餐...
真诚赢得善意,“一元午餐”饭钱意外多出1012元-当前速讯 河南老君山景区无人值守的一元午餐... - 别把研究生换导师想得那么敏感 《她为什么换了导师》——最近,这...
-
 全球快播:看待英语学习不能走极端 近段时间,有两则消息因为英语学习...
全球快播:看待英语学习不能走极端 近段时间,有两则消息因为英语学习... -
 前沿资讯!纳米药针:集针灸和药物功效于一身 ◎实习记者 吴叶凡日前,国家纳米...
前沿资讯!纳米药针:集针灸和药物功效于一身 ◎实习记者 吴叶凡日前,国家纳米... -
 顺利提车新摩卡DHT-PHEV,车主表示相见恨晚 今年9月份我一直在忙一件“大事”...
顺利提车新摩卡DHT-PHEV,车主表示相见恨晚 今年9月份我一直在忙一件“大事”... -
 我国加速打造骨科医学创新高地 每日热点 □记者 曾德金 北京报道患者是最...
我国加速打造骨科医学创新高地 每日热点 □记者 曾德金 北京报道患者是最... -
 环球速看:房企“金九”成绩单成色如何? ■ 王丽新房企9月份成绩单出炉。...
环球速看:房企“金九”成绩单成色如何? ■ 王丽新房企9月份成绩单出炉。... -
 再度刷新世界纪录!“九章三号”光量子计算原型机研制成功 焦点播报 近日,中国科学技术大学中国科学院...
再度刷新世界纪录!“九章三号”光量子计算原型机研制成功 焦点播报 近日,中国科学技术大学中国科学院... -
 智能制造提升长三角食品产业竞争力-天天视讯 无数管道与机械组成了几层楼高的生...
智能制造提升长三角食品产业竞争力-天天视讯 无数管道与机械组成了几层楼高的生... -
 欧佩克上调未来二十年全球石油需求预期 当地时间10月9日,石油输出国组织(...
欧佩克上调未来二十年全球石油需求预期 当地时间10月9日,石油输出国组织(... -
 高校食堂现鼠头?餐饮公司发声 中新网北京10月11日电(记者 袁秀...
高校食堂现鼠头?餐饮公司发声 中新网北京10月11日电(记者 袁秀... -
 2023年世界骨质疏松日中国主题发布:强肌健骨,防治骨松 全球速讯 中新网北京10月11日电 (记者 李...
2023年世界骨质疏松日中国主题发布:强肌健骨,防治骨松 全球速讯 中新网北京10月11日电 (记者 李... -
 天天信息:铁路今起实施新列车运行图 本报讯(记者 金志刚)记者从中国铁...
天天信息:铁路今起实施新列车运行图 本报讯(记者 金志刚)记者从中国铁...